This activity is AWESOME! Takes the biology a step further..that is, not only did we tie in the relationship between biology and chemistry in the last unit with Biomaterials, but this module we are stressing the relationship between biology and PHYSICS!!! This is truly an exercise in creativity and the article I mentioned in my blog post on June 24, "The Creativity in Biology" hits home here. I can see how these modules build on each other..here is my Robot design:
“The Sentinel” Bio-Inspired Medical Nanobot
 |  |
Introduction:
I was always fascinated with the Sentinels from the 1999 Movie “The Matrix” starring Keanu
Reeves. These fictional robots look like a cross between insects, viruses and octopi. What I
found cool is the fact that the robots could find the “prey” and attach to many surfaces, both
organic and metallic. (If you have never seen this movie, check out the video clip below so
you can have an idea of how this unique robot moves).
YOUTUBE
I was always fascinated with the Sentinels from the 1999 Movie “The Matrix” starring Keanu
Reeves. These fictional robots look like a cross between insects, viruses and octopi. What I
found cool is the fact that the robots could find the “prey” and attach to many surfaces, both
organic and metallic. (If you have never seen this movie, check out the video clip below so
you can have an idea of how this unique robot moves).
YOUTUBE
I did some reading on medical nanorobots that are capable of moving through the aquatic
environment of the human blood stream (and therefore an aquatic locomotion) and I wonder
if tiny nano-sized versions of the sentinels from the Matrix could be manufactured that could
be use to target and destroy cancer cells, sequester viruses or crawl through specific tissue
and repair damaged cells or cell parts.
The basic definition of Nanotechology in terms of hierarchy in design:
sense, 'nanotechnology' refers to the projected ability to construct items from the
bottom up using molecular techniques.
“The science, engineering, and technology related to the understanding and control
of matter at the length scale of approximately 1 to 100 nanometers.”
Bioinspiration:
There are many adaptations derived from many organisms that played a role in my first and
second designs. Just the like the Ted Talks Video we watched from Dr. Fuller (with all of the
foot adaptations from so many species that went into one robot design) I took ideas from a
few different organisms including:
• The crystal like surface -receptors from a bacteriophage virus
• The rotary motors of the bacterial and sperm flagella that propel the organism forward.
• The bristle-like extensions and gears found on the legs of insects (as in our week 3 class
readings and videos.
• The flexible nature of octopus arms and the ability to perform multiple tasks
simultaneously.
Biomedical Applications:
The robot will be capable of performing repair of damaged tissue using controlled remote
response and, attack foreign bodies or cancer cells and be able to deliver medicines to
specific target tissues by either the remote control release or surface contact stimulus.
Designs
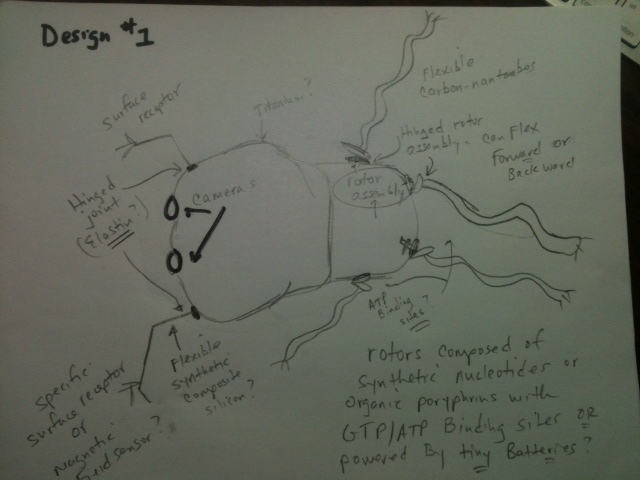
• Design 1
• This one was a bit TOO ambitious! Brief explanation:
• The propulsion would be achieved using a nanomotor assembly that would mimic
the system utilized by a bacterial flagellum. (Videos to follow). The best candidate
material would be carbon nanotubes although synthetic DNAʼs have been used.
The Benefit of using modified organic materials such as DNA/RNA or any modified
amino acids for a motor unit is that ATP or any NTP could be used to power the
machine using the organisms own supply, just like in a real bacterium. The hinges
on the motor assembly would allow the arms to move forward and backward,
perhaps by using the nano-gears as seen on the legs of insects or the hinges found
in insect joints. The receptors on the front of the nanobot would interact with the
surface of the target by either chemical interaction or magnetic fields.
environment of the human blood stream (and therefore an aquatic locomotion) and I wonder
if tiny nano-sized versions of the sentinels from the Matrix could be manufactured that could
be use to target and destroy cancer cells, sequester viruses or crawl through specific tissue
and repair damaged cells or cell parts.
The basic definition of Nanotechology in terms of hierarchy in design:
- Nanotechnology is the engineering of functional systems at the molecular scale.
sense, 'nanotechnology' refers to the projected ability to construct items from the
bottom up using molecular techniques.
“The science, engineering, and technology related to the understanding and control
of matter at the length scale of approximately 1 to 100 nanometers.”
Bioinspiration:
There are many adaptations derived from many organisms that played a role in my first and
second designs. Just the like the Ted Talks Video we watched from Dr. Fuller (with all of the
foot adaptations from so many species that went into one robot design) I took ideas from a
few different organisms including:
• The crystal like surface -receptors from a bacteriophage virus
• The rotary motors of the bacterial and sperm flagella that propel the organism forward.
• The bristle-like extensions and gears found on the legs of insects (as in our week 3 class
readings and videos.
• The flexible nature of octopus arms and the ability to perform multiple tasks
simultaneously.
Biomedical Applications:
The robot will be capable of performing repair of damaged tissue using controlled remote
response and, attack foreign bodies or cancer cells and be able to deliver medicines to
specific target tissues by either the remote control release or surface contact stimulus.
Designs
• Design 1
• This one was a bit TOO ambitious! Brief explanation:
• The propulsion would be achieved using a nanomotor assembly that would mimic
the system utilized by a bacterial flagellum. (Videos to follow). The best candidate
material would be carbon nanotubes although synthetic DNAʼs have been used.
The Benefit of using modified organic materials such as DNA/RNA or any modified
amino acids for a motor unit is that ATP or any NTP could be used to power the
machine using the organisms own supply, just like in a real bacterium. The hinges
on the motor assembly would allow the arms to move forward and backward,
perhaps by using the nano-gears as seen on the legs of insects or the hinges found
in insect joints. The receptors on the front of the nanobot would interact with the
surface of the target by either chemical interaction or magnetic fields.
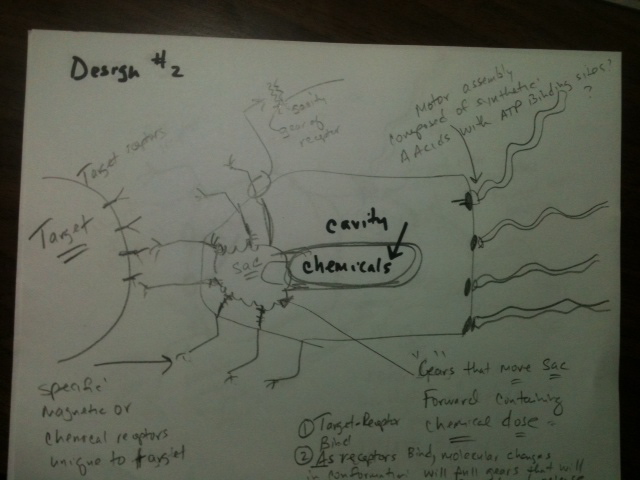
• Design #2:
• I changed the original design; I got rid of the octopus-like arms and reduced the
locomotion generators to a few back rotors like a bacterium; I decided to make
the robot more of a deliverer of medicines and/or doses of radioactive materials
that utilizes a geared-release mechanism. The cavity in the center of the
nanobot is attached to surface fibers that are in turn held together by a gear
system. The materials for the gears would be composed of a stiffer polymer like
chitin while the receptor fibers would be composed of something more flexible.
The receptor molecules themselves at the tips of the fibers would have to be
attached by some sort of covalent linkage, similar to an antibody. The fibers that
make up the nanogears would most likely be composed of carbon nanofibers and
silicon. Synthetic nucleotides and synthetic amino acids with ATP binding sites
showed up in the literature and would be excellent candidates because they can
be powered by materials already found in the human body.
• I changed the original design; I got rid of the octopus-like arms and reduced the
locomotion generators to a few back rotors like a bacterium; I decided to make
the robot more of a deliverer of medicines and/or doses of radioactive materials
that utilizes a geared-release mechanism. The cavity in the center of the
nanobot is attached to surface fibers that are in turn held together by a gear
system. The materials for the gears would be composed of a stiffer polymer like
chitin while the receptor fibers would be composed of something more flexible.
The receptor molecules themselves at the tips of the fibers would have to be
attached by some sort of covalent linkage, similar to an antibody. The fibers that
make up the nanogears would most likely be composed of carbon nanofibers and
silicon. Synthetic nucleotides and synthetic amino acids with ATP binding sites
showed up in the literature and would be excellent candidates because they can
be powered by materials already found in the human body.
 |  |
DESIGNS BORROWED FROM NATURE:
1. The propulsion will be achieved using the flagellar motor assembly inspired by the
human sperm and bacterial flagellum. (See diagram below:)
1. The propulsion will be achieved using the flagellar motor assembly inspired by the
human sperm and bacterial flagellum. (See diagram below:)
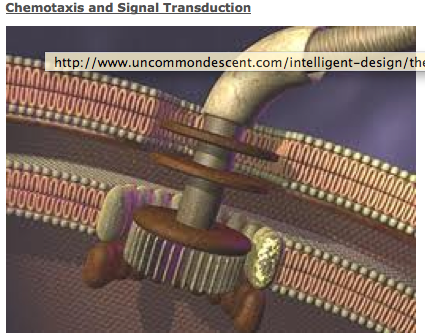
Image above depicts the gear assembly of the flagellar motor assembly from bacteria from bacteria. See the you tube video below for more information on this type of locomotion:
• YOU TUBE VIDEO LINK TO ACADEMIC DESCRIPTION OF THE MOTOR
Example of inspired robot design (“twisting artificial muscles) from Dr Javad
Foroughi, Prof Geoff Spinks and team at the Intelligent Polymer Research Institute
at the University of Wollongong, part of the ARC Centre of Excellence for
Electromaterials Science. (Published in SCIENCE, 2012 October 11.)
Foroughi, Prof Geoff Spinks and team at the Intelligent Polymer Research Institute
at the University of Wollongong, part of the ARC Centre of Excellence for
Electromaterials Science. (Published in SCIENCE, 2012 October 11.)
2. Proposed Medical Robot (proposed design) Taken from “How Stuff Works”
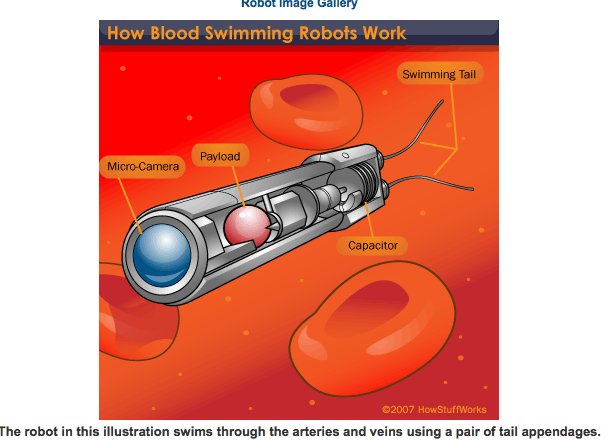
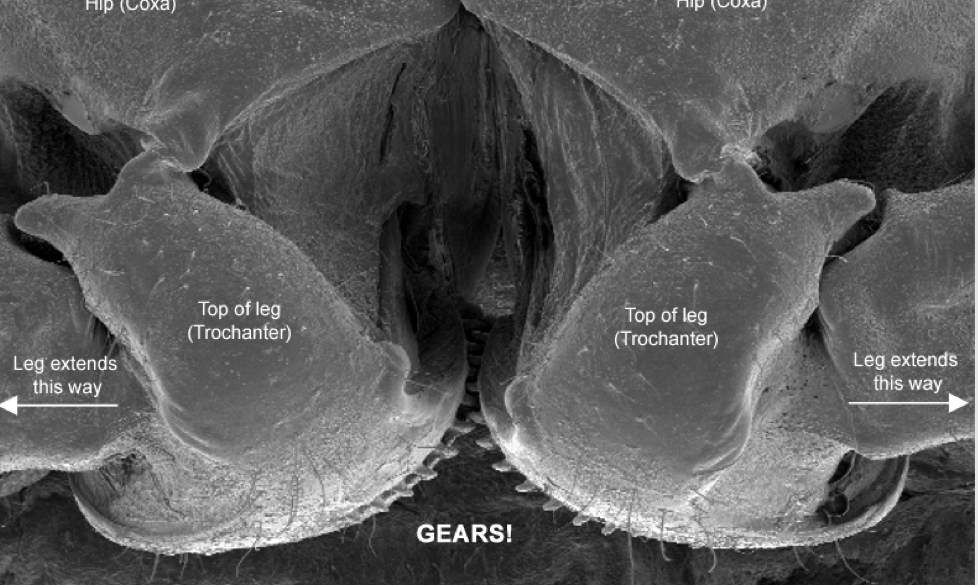
3. Gears inspired by the insect gear systems covered in Week 3 Lecture notes. The
gears would act as a interface between the “receptor fibers” on the front of the robot
and the “expandable sac” within the robot. As the receptor fiber interacts with the
molecules on the targetʼs surface, the conformation changes will move the expandable
“sac” within the robot releasing its contents, or could be an injectable assembly like a
virus, into the target. The motion is automatic and the gears would capture that
forward motion and translate the motion into the robotʼs interior. (See Figures below)
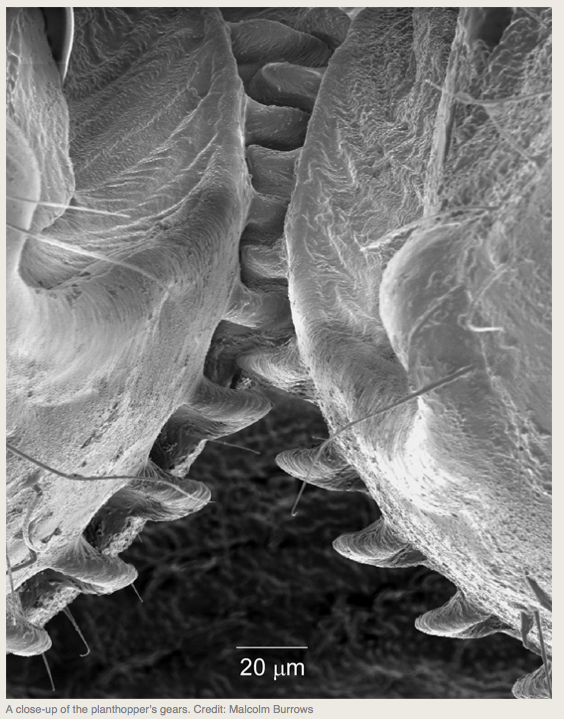
a). Gears inspired from Insects: (Photos from Week 3 Lecture notes)
gears would act as a interface between the “receptor fibers” on the front of the robot
and the “expandable sac” within the robot. As the receptor fiber interacts with the
molecules on the targetʼs surface, the conformation changes will move the expandable
“sac” within the robot releasing its contents, or could be an injectable assembly like a
virus, into the target. The motion is automatic and the gears would capture that
forward motion and translate the motion into the robotʼs interior. (See Figures below)
a). Gears inspired from Insects: (Photos from Week 3 Lecture notes)
 |  |
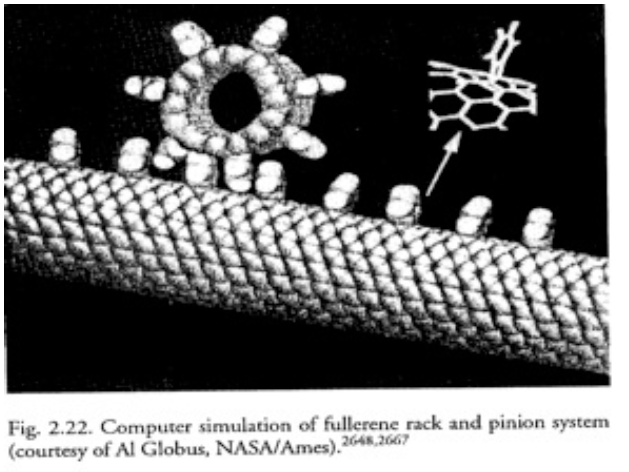
b.) The diagram below is an example of nano-gears composed of carbon nanofibers.
These would be incorporated into the medical nanobot. The
construction of the carbon -fibers is proposed to be done by virus-directly
assembly similar to the process discussed in this weekʼs Ted Talks by Angela
Belcher (Virus-assembled Batteries..see source list),
These would be incorporated into the medical nanobot. The
construction of the carbon -fibers is proposed to be done by virus-directly
assembly similar to the process discussed in this weekʼs Ted Talks by Angela
Belcher (Virus-assembled Batteries..see source list),
c.) Cell-Signaling and Surface Receptors. T
The robot would exhibit some type of surface reception similar to that found in cell-surface communication.
When the robot reaches its target, the molecular conformational changes will
cause the gears to move and that motion will drive the released of the robotʼs
inner contents (medicine, radioactive probes, whatever needs to be delivered to
specific target). For a review of surface reception, I have included the
Bozeman Video I used in my class:
The robot would exhibit some type of surface reception similar to that found in cell-surface communication.
When the robot reaches its target, the molecular conformational changes will
cause the gears to move and that motion will drive the released of the robotʼs
inner contents (medicine, radioactive probes, whatever needs to be delivered to
specific target). For a review of surface reception, I have included the
Bozeman Video I used in my class:
Technical Challenges of Aquatic Locomotion of Nanobots in fluids / Physical Limits
• In an aqueous environment, the biggest challenge becomes friction (or drag) from the
fluid.
• The density of the robot is important since you donʼt want the robot sinking or floating to
the top of the blood vessel so the density of the robot should be such that it matched
that of the blood (same specific gravity)
• Newtonʼs Third Law applies here; in order for an animal to move FORWARD in an
aqueous environment, the fluid must be pushed BACKWARD; therefore the animal
(ROBOT) must have an efficient means of pushing the fluid backwards to move towards
its target within the blood stream. This becomes a huge problem the SMALLER the
robot becomes. See the video below that explains the problems of moving nano-sized
objects through a liquid medium:
• YOU TUBE: THE PHYSICS OF SPERM AND SMALL ORGANISMS and the REYNOLDS NUMBER
• In an aqueous environment, the biggest challenge becomes friction (or drag) from the
fluid.
• The density of the robot is important since you donʼt want the robot sinking or floating to
the top of the blood vessel so the density of the robot should be such that it matched
that of the blood (same specific gravity)
• Newtonʼs Third Law applies here; in order for an animal to move FORWARD in an
aqueous environment, the fluid must be pushed BACKWARD; therefore the animal
(ROBOT) must have an efficient means of pushing the fluid backwards to move towards
its target within the blood stream. This becomes a huge problem the SMALLER the
robot becomes. See the video below that explains the problems of moving nano-sized
objects through a liquid medium:
• YOU TUBE: THE PHYSICS OF SPERM AND SMALL ORGANISMS and the REYNOLDS NUMBER
• Powering the robot: how can the robot be powered at such a small scale? Suggestions
include using the bodyʼs own ATP source; if the nanomaterial at the motor was
composed of synthetic amino acids with ATP binding sites, than the motor can use this
as a source. Other ideas include using “SEEBECK EFFECT” (see below), tiny
capacitors, nuclear power of magnetic fields applied from an external source to drive the
robot within the body.
• SEEBACK EFFECT: The Seebeck effect occurs when two conductors made of different metals are
joined at two points that are kept at two different temperatures. The metal conductors become a
thermocouple, meaning that they generate voltage when the junctures are at different temperatures.
Since it's difficult to rely on temperature gradients within the body, it's unlikely we'll see many
nanorobots use body heat for power. (Source: HOW STUFF WORKS).
• How will the nanobot be recovered, removed? This is a big challenge. Method that I found in
my research mainly focused on using ultrasound waves to break up the nanoparticle into sizes
that can be easily excreted. Other methods include the use of magnetic fields to guide the
particles to the kidney for excretion. Also, using the immune system to remove the particles has
been suggested as well. This is a problem that is being researched intensely.
Current Medical Nanobot Prototypes:
• “Cyberplasm” is a medical nanobot constructed that is designed to detect cancer cells. See Figure Below"
include using the bodyʼs own ATP source; if the nanomaterial at the motor was
composed of synthetic amino acids with ATP binding sites, than the motor can use this
as a source. Other ideas include using “SEEBECK EFFECT” (see below), tiny
capacitors, nuclear power of magnetic fields applied from an external source to drive the
robot within the body.
• SEEBACK EFFECT: The Seebeck effect occurs when two conductors made of different metals are
joined at two points that are kept at two different temperatures. The metal conductors become a
thermocouple, meaning that they generate voltage when the junctures are at different temperatures.
Since it's difficult to rely on temperature gradients within the body, it's unlikely we'll see many
nanorobots use body heat for power. (Source: HOW STUFF WORKS).
• How will the nanobot be recovered, removed? This is a big challenge. Method that I found in
my research mainly focused on using ultrasound waves to break up the nanoparticle into sizes
that can be easily excreted. Other methods include the use of magnetic fields to guide the
particles to the kidney for excretion. Also, using the immune system to remove the particles has
been suggested as well. This is a problem that is being researched intensely.
Current Medical Nanobot Prototypes:
• “Cyberplasm” is a medical nanobot constructed that is designed to detect cancer cells. See Figure Below"

Image: 17 March, 2014 in Science. Tags: Cyberplasm, Cyberplasm - a new disease
detecting nanobot for humans, disease detecting nanobot for humans
detecting nanobot for humans, disease detecting nanobot for humans
• “Cancer Destroyer” designed by Japanese company; still too big for human use.
FInal Notes:
One thing really fascinated me when I performed my research is that nanotechnology was
introduced to the science arena by Richard Feynman back in the 1950ʻs. He challenged his
graduate students to design a machine that would fit inside of a cube 1/64th of an inch on all
sides. It was this challenge that spark the development of the field of nanomachines. (How
Stuff Works).
When I teach cellular biology, I refer to the cell parts as machines. I think my students have
a better grasp of molecular biology if I can use machine analogies. I believe nature natureʼs
molecular machinery is truly the key to building more efficient systems from everything to
energy to medicine.
The following is an excellent summary from a TED TALKS video on the challenges of
constructing nanorobots for medical applications:
LINK TO TED TALKS VIDEO MEDICAL NANBOTS
One thing really fascinated me when I performed my research is that nanotechnology was
introduced to the science arena by Richard Feynman back in the 1950ʻs. He challenged his
graduate students to design a machine that would fit inside of a cube 1/64th of an inch on all
sides. It was this challenge that spark the development of the field of nanomachines. (How
Stuff Works).
When I teach cellular biology, I refer to the cell parts as machines. I think my students have
a better grasp of molecular biology if I can use machine analogies. I believe nature natureʼs
molecular machinery is truly the key to building more efficient systems from everything to
energy to medicine.
The following is an excellent summary from a TED TALKS video on the challenges of
constructing nanorobots for medical applications:
LINK TO TED TALKS VIDEO MEDICAL NANBOTS
Sources:
Barker, Veronique. "Fantastic Voyage - From Fiction to Reality." innovation Canada.ca. July-August 2007, Issue
29.
Burrows & Sutton. 2013. Interacting Gears Synchronize Propulsive Leg Movements in a Jumping
Insect. Science http://dx.doi.org/10.1126/science.1240284
Cavalcanti, Adriano, et al. "Nanorobot for Treatment of Patients with Artery Occlusion." Proceedings of Virtual
Concept, 2006. Cancun, Mexico.
Cavalcanti, Adriano. "Nanorobotics." NanoScience Today. September 13, 2004. http://www.geocities.com/
cbicpg/nanoscience/NST2004/nanorobots.htm
Griml, Guy. "Israeli scientists unveil mini-robot that can travel through bloodstream." Haaretz.com. July 17,
2007. http://wwwhaaretz.com/hasen/spages/875277.html
Hyperphysics. http://hyperphysics.phy-astr.gsu.edu/hbase/hframe.html. (Physics Laws)
"Israeli scientists invent smallest robot to deliver drugs through blood vessels." China View. June 27, 2007.
http://news.xinhuanet.com/english/2007-06/27/content_6300084.htm
Knight, Will. "Drugs delivered by robots in the blood." NewScientist.com. October, 2004. www.newscientist.com/
article/dn6474.html
Rubinstein, Leslie. "A Practical NanoRobot for Treatment of Various Medical Problems." Foresight Nanotech
Institute. http://www.foresight.org/conference/MNT8/Papers/Rubinstein/index.html
Strickland, Jonathan. “How Nanobots Will Work.” How Stuff Works.http://electronics.howstuffworks.com/
nanorobot7.htm
"Technion Researchers Find Way to Move Swimming Robot Through the Human Body." Technion University
Press Release. October 29, 2006. http://pard.technion.ac.il/archives/presseng/Html/PR_
swimmersENG_29_10.Html
Video Sources:
Robert fuller Ted Talks...do not attempt to mimic nature...be inspired by it!!
http://www.ted.com/talks/robert_full_on_animal_movement#t-1133787
The physics of sperm TED TALKS: https://www.youtube.com/watch?v=U9g4gRWkFTs
Ted Talks: Building Medical Robots: https://www.youtube.com/watch?v=DfV8xu2nHy4
Nanotech You Tube: Twisting medical muscles: https://www.youtube.com/watch?
v=JQdu8d3EUaY
Octopus Robotics https://www.youtube.com/watch?v=Gvx8GwTCx_A
Barker, Veronique. "Fantastic Voyage - From Fiction to Reality." innovation Canada.ca. July-August 2007, Issue
29.
Burrows & Sutton. 2013. Interacting Gears Synchronize Propulsive Leg Movements in a Jumping
Insect. Science http://dx.doi.org/10.1126/science.1240284
Cavalcanti, Adriano, et al. "Nanorobot for Treatment of Patients with Artery Occlusion." Proceedings of Virtual
Concept, 2006. Cancun, Mexico.
Cavalcanti, Adriano. "Nanorobotics." NanoScience Today. September 13, 2004. http://www.geocities.com/
cbicpg/nanoscience/NST2004/nanorobots.htm
Griml, Guy. "Israeli scientists unveil mini-robot that can travel through bloodstream." Haaretz.com. July 17,
2007. http://wwwhaaretz.com/hasen/spages/875277.html
Hyperphysics. http://hyperphysics.phy-astr.gsu.edu/hbase/hframe.html. (Physics Laws)
"Israeli scientists invent smallest robot to deliver drugs through blood vessels." China View. June 27, 2007.
http://news.xinhuanet.com/english/2007-06/27/content_6300084.htm
Knight, Will. "Drugs delivered by robots in the blood." NewScientist.com. October, 2004. www.newscientist.com/
article/dn6474.html
Rubinstein, Leslie. "A Practical NanoRobot for Treatment of Various Medical Problems." Foresight Nanotech
Institute. http://www.foresight.org/conference/MNT8/Papers/Rubinstein/index.html
Strickland, Jonathan. “How Nanobots Will Work.” How Stuff Works.http://electronics.howstuffworks.com/
nanorobot7.htm
"Technion Researchers Find Way to Move Swimming Robot Through the Human Body." Technion University
Press Release. October 29, 2006. http://pard.technion.ac.il/archives/presseng/Html/PR_
swimmersENG_29_10.Html
Video Sources:
Robert fuller Ted Talks...do not attempt to mimic nature...be inspired by it!!
http://www.ted.com/talks/robert_full_on_animal_movement#t-1133787
The physics of sperm TED TALKS: https://www.youtube.com/watch?v=U9g4gRWkFTs
Ted Talks: Building Medical Robots: https://www.youtube.com/watch?v=DfV8xu2nHy4
Nanotech You Tube: Twisting medical muscles: https://www.youtube.com/watch?
v=JQdu8d3EUaY
Octopus Robotics https://www.youtube.com/watch?v=Gvx8GwTCx_A

 RSS Feed
RSS Feed