| 
|
Inspiraton fromNature:
The inspiration for this miniature robot was derived from both bee flight mechanics and bee "HIVE' behavior. The team hoped to emulate not only the flight mechanics of the bee but also fine-tuned communicaton between multiple roboees by developing mini-sensors capable of processing information from multiple robots to achieve coordinated movements similar to "native" bee colony behaviors. Recent environmental concerns regarding "colony-collapse disorder," that is, the threat to the native North American honeybee population, has sparked much research into the field of artifiicial pollnation to avoid an economic disaster in the agricultural arena.
Description of the bioinspired robot:
These miniature Robots were first sucesssfully produced by Professor Robert J. Wood ath the Wyss Institute for Biologically Inspired Engineering at Harvard University. The robots were inspired by bee flight mechanics AND bee colony behavior. The development of the robobee was part of an engineering challenge to "spur" advances in small-scale robotics and development new forms of compact, "high-energy" power sources and inspire innovations in what the Harvard team calls "ultra-low-power computing and electronic “smart” sensors. Finally, the bees will be able to communicate with each other which will allow coordination of multiple "robobees" to mimic their own hive behaviors. The development of the Robobee included three major categories:
Body
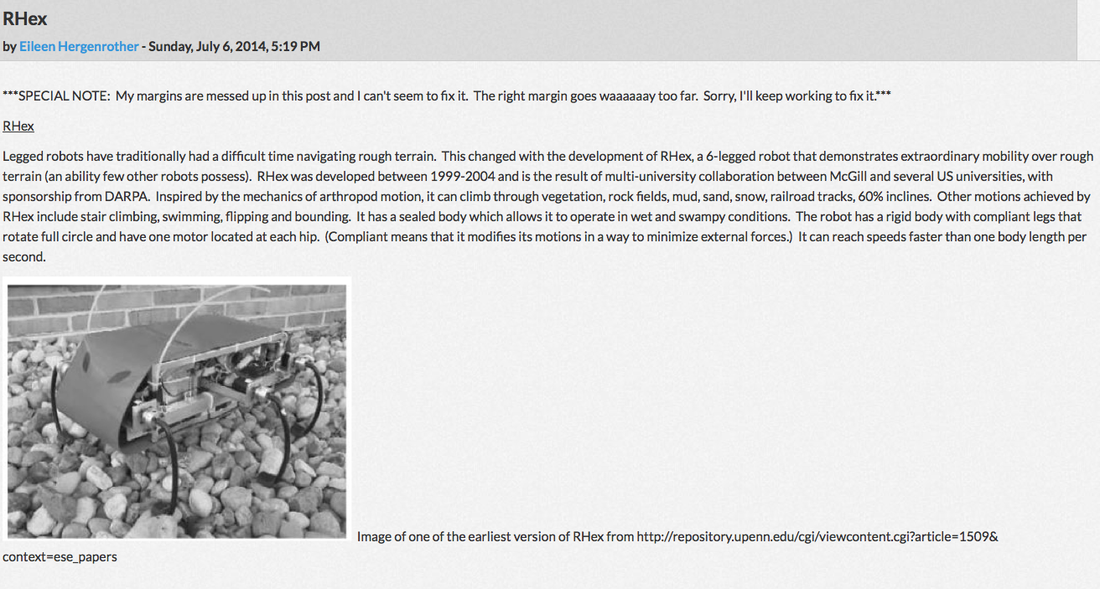
The inspiration for this miniature robot was derived from both bee flight mechanics and bee "HIVE' behavior. The team hoped to emulate not only the flight mechanics of the bee but also fine-tuned communicaton between multiple roboees by developing mini-sensors capable of processing information from multiple robots to achieve coordinated movements similar to "native" bee colony behaviors. Recent environmental concerns regarding "colony-collapse disorder," that is, the threat to the native North American honeybee population, has sparked much research into the field of artifiicial pollnation to avoid an economic disaster in the agricultural arena.
Description of the bioinspired robot:
These miniature Robots were first sucesssfully produced by Professor Robert J. Wood ath the Wyss Institute for Biologically Inspired Engineering at Harvard University. The robots were inspired by bee flight mechanics AND bee colony behavior. The development of the robobee was part of an engineering challenge to "spur" advances in small-scale robotics and development new forms of compact, "high-energy" power sources and inspire innovations in what the Harvard team calls "ultra-low-power computing and electronic “smart” sensors. Finally, the bees will be able to communicate with each other which will allow coordination of multiple "robobees" to mimic their own hive behaviors. The development of the Robobee included three major categories:
Body
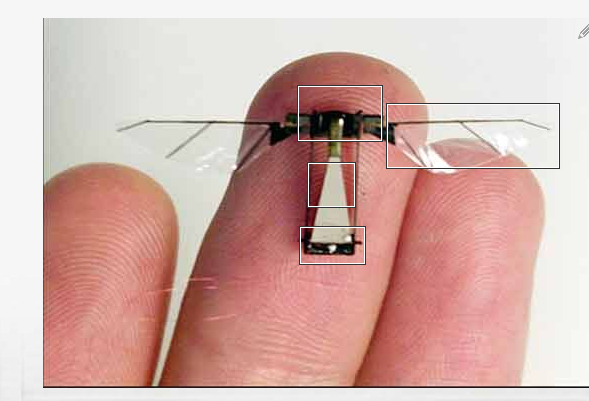
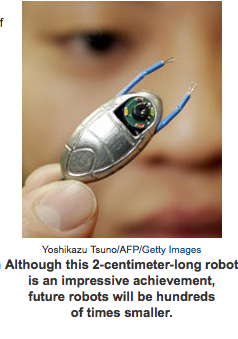
- The materials used for the body needed to be light weight, but meet the aerobic feats of a bee. Also, autonomous flight requires COMPACT, ghih energy power sources that are integrated within the body of the machine. You will notice that the shape of the ROBOBEE (not to be confused with the ROBOFLY that is published on the web) has evolved from a helicopter-like to a more bee-like shape (See Figure Below).

Brain
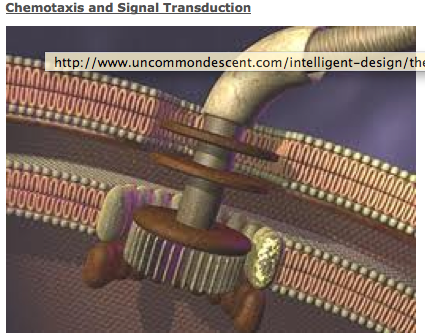
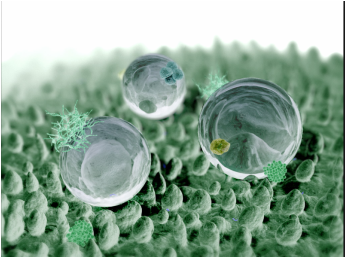
- The biggest challenge to the development of Colony Behavior withing the robobee population is to develop miniature SMART SENSORS, like the ones in cars that prevent bumping into one another. The same technology is applied here but miniaturizing the multiple "suite" of sensors to act like an artificial brain is still being researched. This inspired project provides insight for developing sensory pathways that can not only be used in bee -behavior technology but also in human disorders such as Parkinson's or Alzheimer's Disease. See Figure below for "Smart Technology').
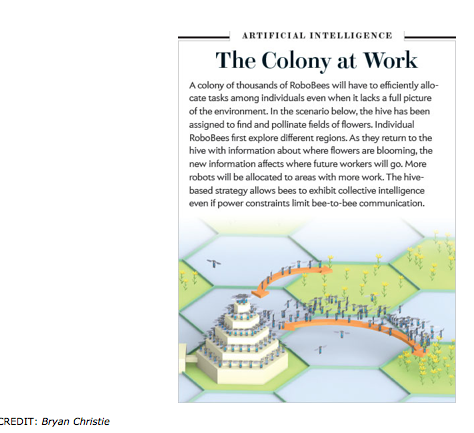
Colony
- The Artificial Intelligence mentioned above will be extended to allow machines to talk to each other and the "hive." Similar to cell phone technology, the computer programming will allow the bees to recognize the difference between "global" and "local" signals to mimic the bees ability to identify the location of food sources and find their way back to the hive.
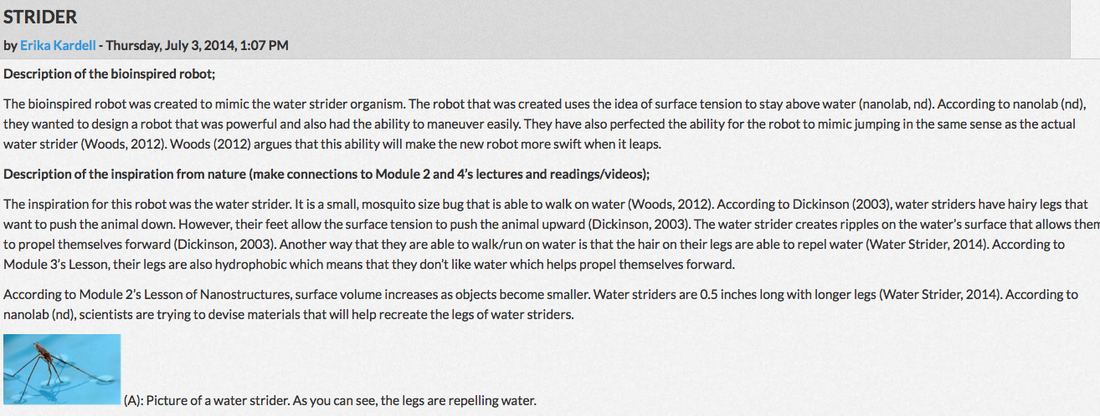
(Image: Harvard, http://robobees.seas.harvard.edu/) ( Image: http://en.wikipedia.org/wiki/RoboBee)
Inspiraton fromNature:
The inspiration for this miniature robot was derived from both bee flight mechanics and bee "HIVE' behavior. The team hoped to emulate not only the flight mechanics of the bee but also fine-tuned communicaton between multiple roboees by developing mini-sensors capable of processing information from multiple robots to achieve coordinated movements similar to "native" bee colony behaviors. Recent environmental concerns regarding "colony-collapse disorder," that is, the threat to the native North American honeybee population, has sparked much research into the field of artifiicial pollnation to avoid an economic disaster in the agricultural arena.
Description of the bioinspired robot:
These miniature Robots were first sucesssfully produced by Professor Robert J. Wood ath the Wyss Institute for Biologically Inspired Engineering at Harvard University. The robots were inspired by bee flight mechanics AND bee colony behavior. The development of the robobee was part of an engineering challenge to "spur" advances in small-scale robotics and development new forms of compact, "high-energy" power sources and inspire innovations in what the Harvard team calls "ultra-low-power computing and electronic “smart” sensors. Finally, the bees will be able to communicate with each other which will allow coordination of multiple "robobees" to mimic their own hive behaviors. The development of the Robobee included three major categories:
- Body The materials used for the body needed to be light weight, but meet the aerobic feats of a bee. Also, autonomous flight requires COMPACT, ghih energy power sources that are integrated within the body of the machine. You will notice that the shape of the ROBOBEE (not to be confused with the ROBOFLY that is published on the web) has evolved from a helicopter-like to a more bee-like shape (See Figure Below).
-
- Brain The biggest challenge to the development of Colony Behavior withing the robobee population is to develop minature SMART SENSORS, like the ones in cars that prevent bumping into one another. The same technology is applied here but miniaturizing the mulitple "suite" of sensors to act like an artificial brain is still being researched. This inspired project provides insight for developing sensory pathways that can not only be used in bee -behavior technology but also in human disorders such as Parkinson's or Alzheimer's Disease. See Figure below for "Smart Technolgoy').
- Colony The Artificial Intelligence mentioned above will be extended to allow machines to talk to each other and the "hive." Similar to cell phone technology, the computer programming will allow the bees to recognize the difference between "global" and "local" signals to mimic the bees ability to identify the location of food sources and find their way back to the hive.
- The initial goal of the project was to develop a mini-robot that could supplement the pollination process normally performed by bees. Another goal of the project was to take advantage of "self-organizing, pop-up" assembly methods so decrease the energy input requirements in the mass-production of the robobee. (See Video clip on self-assembly). The body plan was an evolution of design. The team need to develop an artificial muscle to mimic the fast flapping action of a true wing. The heavy rotors present on(spinning) wings become an issue the smaller an object becomes due to friction forces. Frictionbegin to dominate over volume-related forces such as gravity and inertia. In other words, the amount of material needed to create the spiinning wing like the common robohelicopters, are too heavy for something as small as the robobee. So the develop of artificial muscle material, something flexible that snaps back into shape. The artificial muscle that the team developed is made of piezoelectric materials that contract when you apply a voltage across their thickness. The flapping over the spinning was key to developing a MINI-ROBOT that could overcome the huge forces of friction (high SURFACE TO VOLUME RATIO) of the surrounding air.
YOU TUBE VIDEO OF GRAD STUDENT EXPLAINING PROCESS OF POP-UP ASSEMBLY
Is the new bioinspired robot a societal win in your opinion?
- This is a tough call. If you assume that all of the native pollinators are extinct, an economic collapse is looming with no other ecological options, than yes, this is a societal win. But I am not in favor of replacing native populations anytime soon. From an ENVIRONMENTAL viewpoint, not strictly ECONOMIC, I believe it is of critical importance the we humans focus more on the recovery of the native bee populations. It is impossible to fully understand the complexity of the bee behavior. Just like in any experiment, we can NEVER know all of the variables involved because we can't possible know imagine all of them. So, I think this technology is super cool and has many applications, but I don't believe we should ever consider replacing ANY species. Here are some other applications of the ROBOBEE not mentioned above:
- autonomously pollinating a field of crops;
- search and rescue (e.g., in the aftermath of a natural disaster);
- hazardous environment exploration;
- military surveillance; (although some people are against this one!!)
- high resolution weather and climate mapping; and
- traffic monitoring.
Your opinion on if this is truly a biomimicry or bioinspired robot
I don't know why I am still having trouble with this one. The ROBOBEE is supposed to "mimic" the behavior of the pollinating bee, but it's design is truly BIOINSPIRATION since the production involves completely artificial materials. Even the self-assembly pop-up design is manufactured by man and is NOT necessarily biodegradable. So, the behavior is mimicry, but the overall ROBOBEE is bioinspired.
EXTRA COOL STUFF:
For you classrooms, here is a PDF link for instructions on how your students can build a ROBOBEE:
Cool Fun YOUTUBE VIDEO explanatio of ROBOBEES sure to be enjoyed by your students.
Sources
"Robobees." Robobees. Harvard Universisty, 2014. Web. 04 July 2014. <http://robobees.seas.harvard.edu/>.
"RoboBee." Wikipedia. Wikimedia Foundation, 21 May 2014. Web. 02 July 2014. <http://en.wikipedia.org/wiki/RoboBee>.
Schwartz, Ariel. "This Robotic Bee Just Took Flight, To Pollinate Crops And (Maybe) Spy On You." Co.Exist. Fast Company & Inc, May 2013. Web. 02 July 2014. <http://www.fastcoexist.com/1682095/this-robotic-bee-just-took-flight-to-pollinate-crops-and-maybe-spy-on-you>.
Wood, Robert, Radhika Nagpal, and Gu-Yeon Wei. "Flight of the Robobees." Scientific American 308.3 (2013): 60-65.
I don't know why I am still having trouble with this one. The ROBOBEE is supposed to "mimic" the behavior of the pollinating bee, but it's design is truly BIOINSPIRATION since the production involves completely artificial materials. Even the self-assembly pop-up design is manufactured by man and is NOT necessarily biodegradable. So, the behavior is mimicry, but the overall ROBOBEE is bioinspired.
EXTRA COOL STUFF:
For you classrooms, here is a PDF link for instructions on how your students can build a ROBOBEE:
Cool Fun YOUTUBE VIDEO explanatio of ROBOBEES sure to be enjoyed by your students.
Sources
"Robobees." Robobees. Harvard Universisty, 2014. Web. 04 July 2014. <http://robobees.seas.harvard.edu/>.
"RoboBee." Wikipedia. Wikimedia Foundation, 21 May 2014. Web. 02 July 2014. <http://en.wikipedia.org/wiki/RoboBee>.
Schwartz, Ariel. "This Robotic Bee Just Took Flight, To Pollinate Crops And (Maybe) Spy On You." Co.Exist. Fast Company & Inc, May 2013. Web. 02 July 2014. <http://www.fastcoexist.com/1682095/this-robotic-bee-just-took-flight-to-pollinate-crops-and-maybe-spy-on-you>.
Wood, Robert, Radhika Nagpal, and Gu-Yeon Wei. "Flight of the Robobees." Scientific American 308.3 (2013): 60-65.







 RSS Feed
RSS Feed